| Contact | ||||
|
| Laboratoire de Mécanique des Fluides et d'Acoustique, UMR 5509 | |||
|
| Laboratoire Pprime, UPR 3346 | |||
|
| Laboratoire Ampère, UMR 5505 | |||
|
| Renault Trucks, groupe Volvo | |||
|
| PSA Peugeot Citroen |
Le programme s'inscrit dans la thématique 'Mobilité et Systèmes urbains durables' de l'appel à projet ANR 2015, dans l'axe 'Véhicules propres et sûrs ; Efficacité énergétique des véhicules : groupes motopropulseurs et approches globales'. Il concerne l'amélioration des performances aérodynamiques des véhicules terrestres, du point de vue énergétique. Les véhicules avec une forme arrière proche du parallélépipède, qu'ils correspondent à des véhicules de tourisme ou à des véhiules particuliers comme illustré en Figure 1, sont les cibles de ce programme.
Pour les véhicules ayant cette spécificité géométrique, le bénéfice écologique et économique d'une amélioration des propriétés aérodynamiques est potentiellement très significatif, dans un contexte de raréfaction des ressources fossiles, pour plusieurs raisons. D'une part, pour les véhicules avec moteur thermique, en améliorant l'aérodynamisme sans modification du cycle thermodynamique du moteur, la réduction de consommation de carburant se traduit directement par une réduction d'émission des polluants. De plus,
Pour les véhicules grand-routiers - poids lourds forte charge - la consommation moyenne est de 34 L/100 km et la consommation annuelle par véhicule est de 54 000 L. Le niveau moyen d'émission de CO2 est de 84 g par tonne de chargement et par kilomètre. Les caractéristiques de ce type de véhicule sont telles que, à vitesse stabilisée sur autoroute, 10% de réduction de traînée correspondrait à 3% de réduction de consommation de carburant. Sur un plan économique, le poste 'carburant' représente la dépense principale des compagnies de transport.
Pour les véhicules particuliers, le niveau annuel d'émission de CO2 dépasse les 22 milliards de tonnes. A l'horizon 2030, l'augmentation attendue de ce chiffre est de 57%. Pour les constructeurs d'automobiles, le niveau typique d'émission par véhicule européen est d'environ 110 g/km au début 2014. Cette performance est à mettre en perspective des cibles liées à la règlementation européenne, visant 95 g/km pour 2020 et 75 g/km pour 2025. Ces objectifs pourront être atteints par un travail sur la motorisation, sur la réduction du poids des véhicules et aussi par une amélioration significative des performances aérodynamiques des véhicules. La réduction de la traînée aérodynamique est une cible prioritaire dans la perspective de l'utilsation de technologies de motorisation alternatives, puisqu'elle permettra une amélioration de l'autonomie. Par exemple
à 50 km/h, la traînée aérodynamique contribue à hauteur de 50% de la résistance à l'avancement du véhicule
elle représente 80% de la résistance total à 130 km/h
pour un véhicule de la gamme M1 (type Peugeot 308) parcourant 100 kilomètres à 120 km/h, réduire la traînée de 25% permettrait de faire chuter la consommation en carburant d'environ 1.8 litres et les émissions de CO2 de 2 kg (20g/km). Transposée au cycle mixte WLTP, la réduction de consommation et d'émission directe de CO2 représenterait 0.15 L et 0.73 kg pour 100 km. Pour ce cyle, la consommation totale en France serait réduite de 0.5 millions de tonnes et les émissions CO2 de 3.3 millions tonnes.
|
|
Les objectifs généraux de ce programme sont les suivants :
Pour atteindre les objectifs du programme, une structuration en 4 tâches distinctes a été choisie :
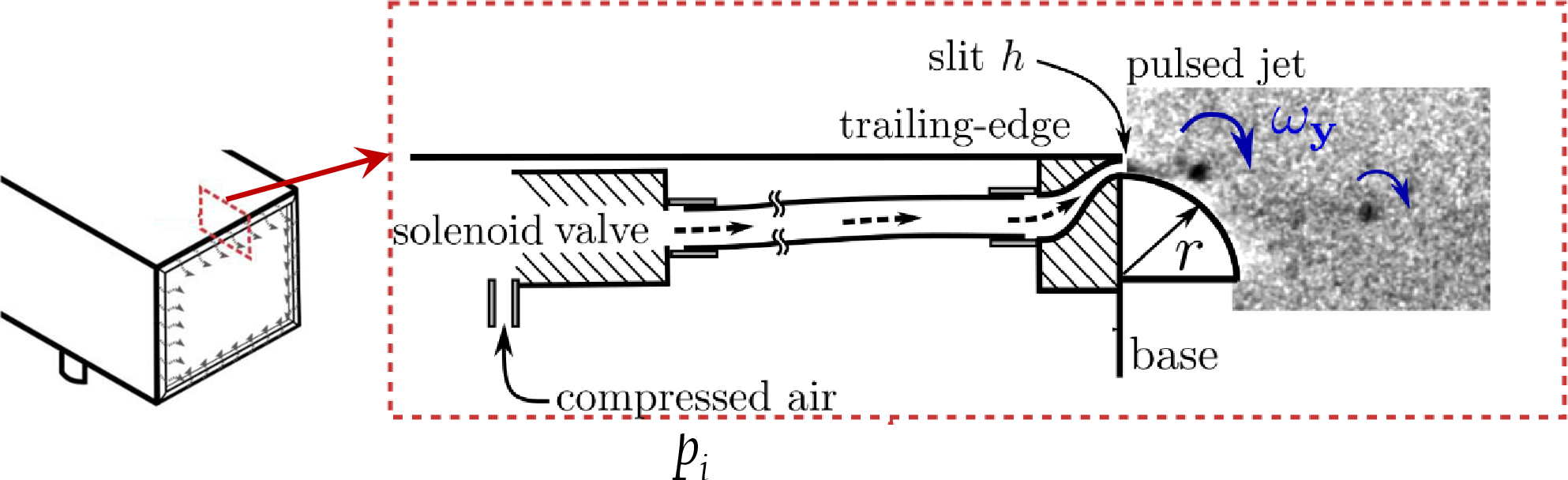
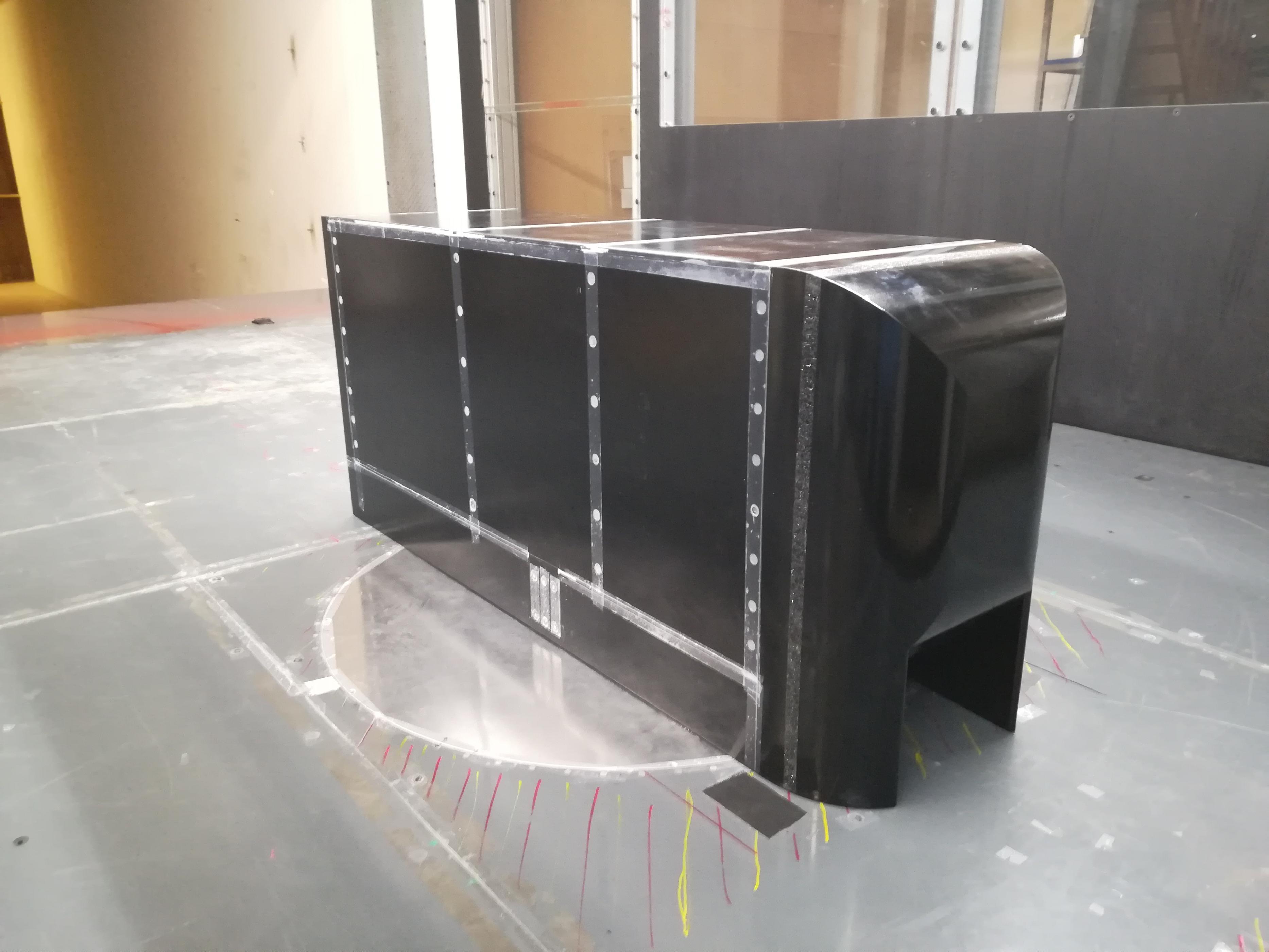
Pour les expériences envisagées, il a été nécessaire de développer une maquette générique pouvant être adaptée aux différentes tâches du programme, et un système de contrôle pneumatique piloté électroniquement.
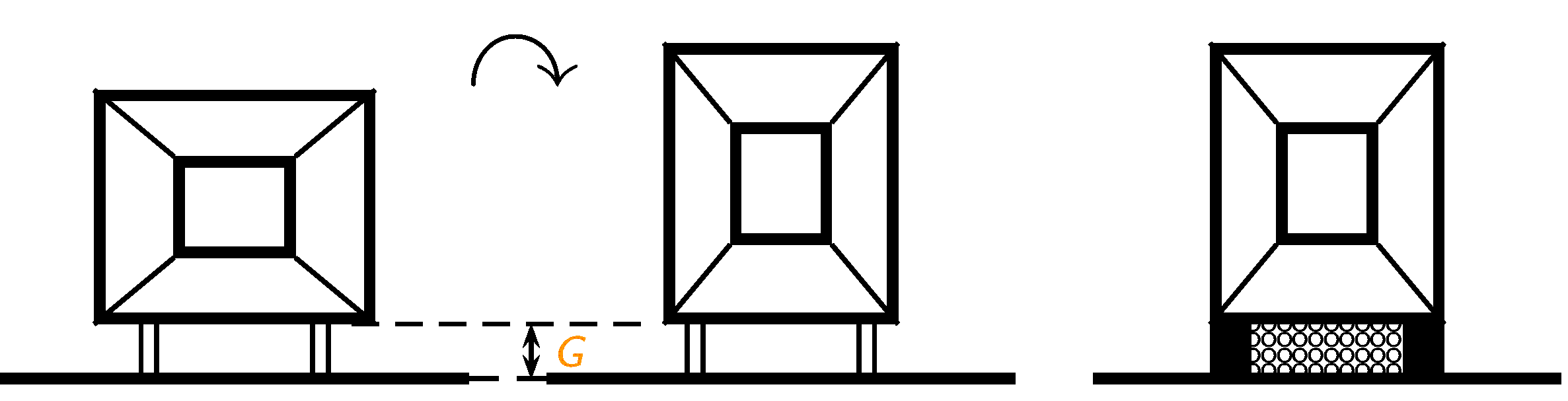

Configuration grand côté parallèle au sol
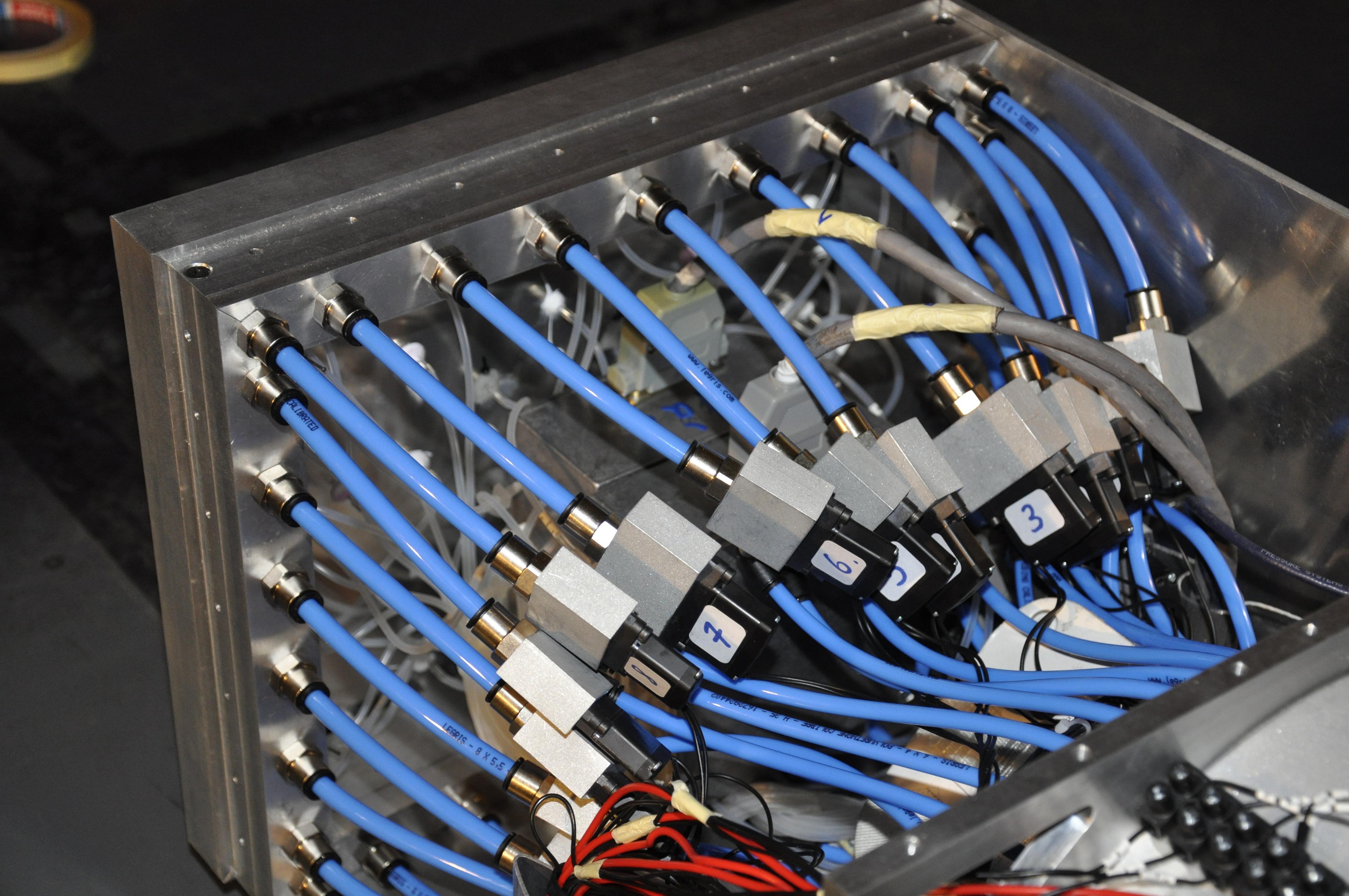
Vue intérieure de la maquette
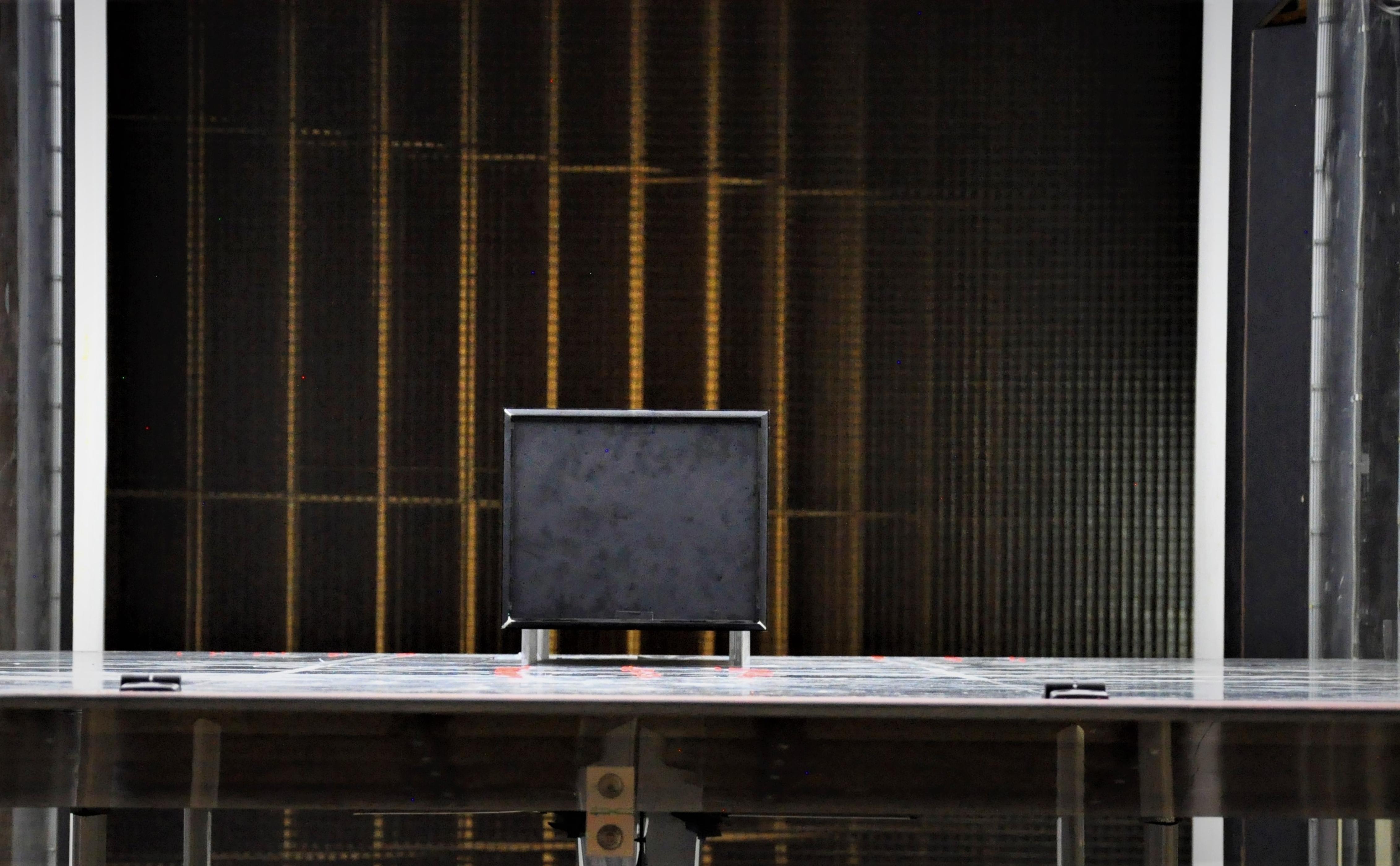
Configuration petit côté parallèle au sol (camion)

Vue latérale
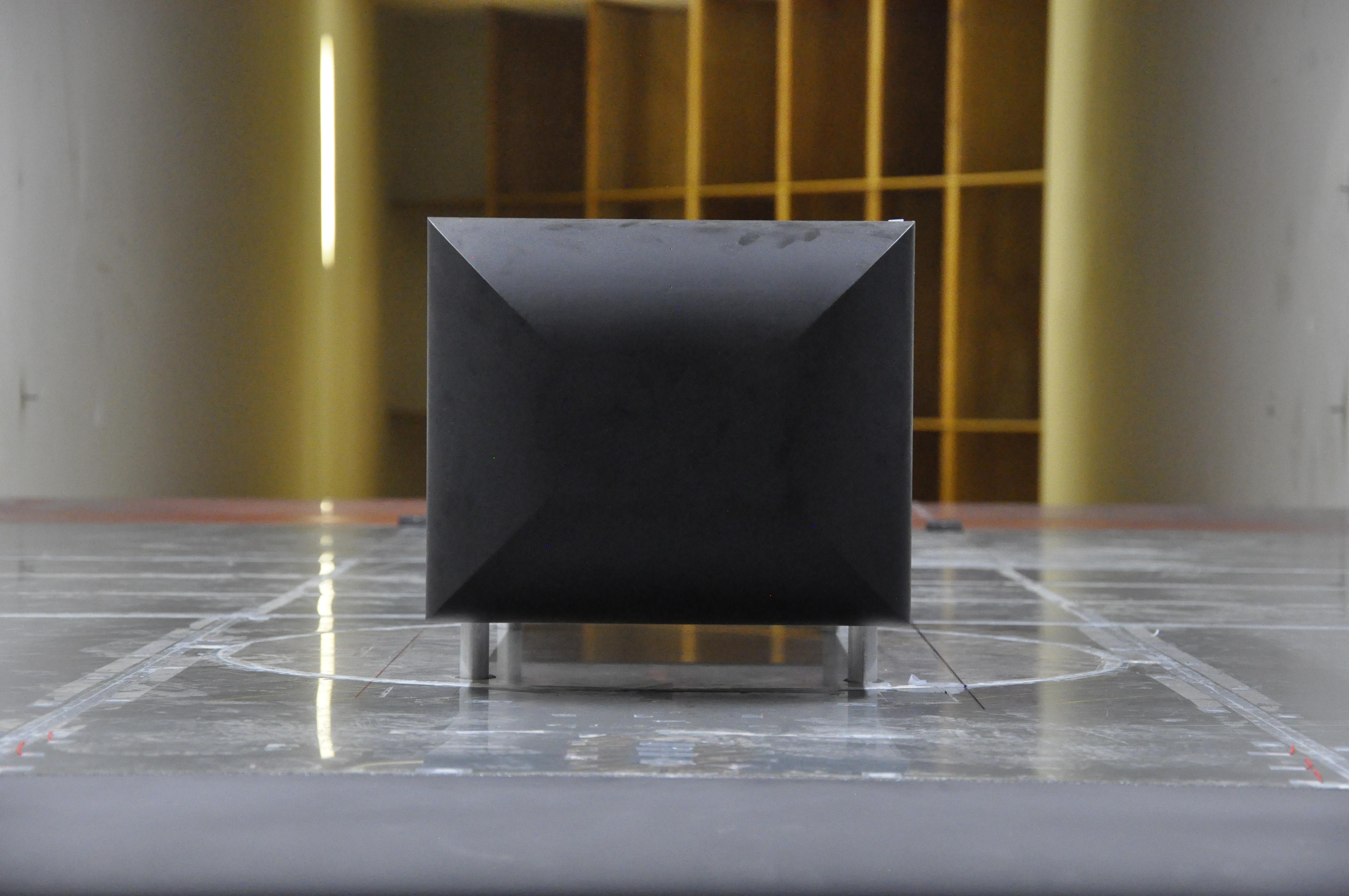
Vue avant
Vue arrière
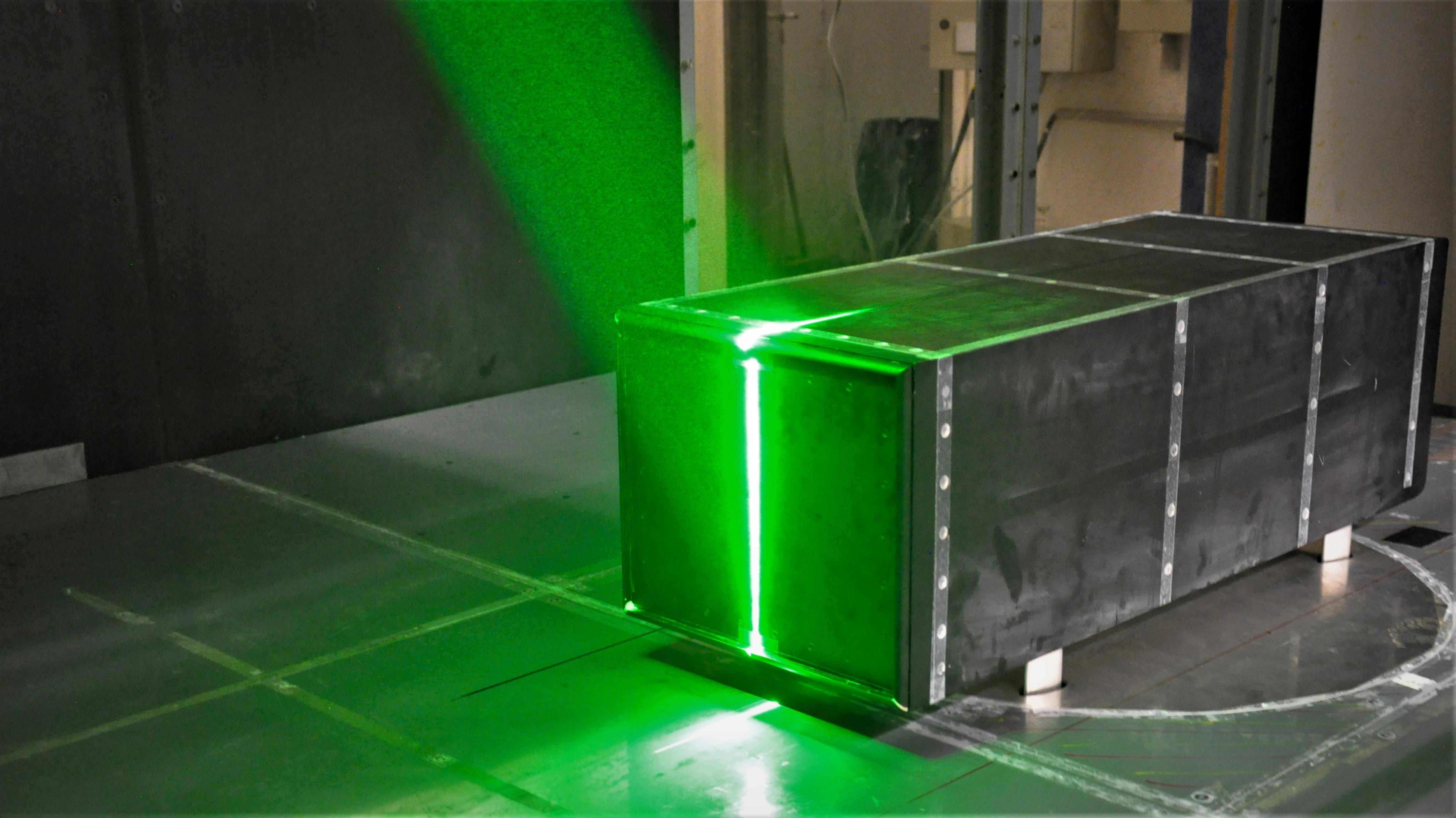
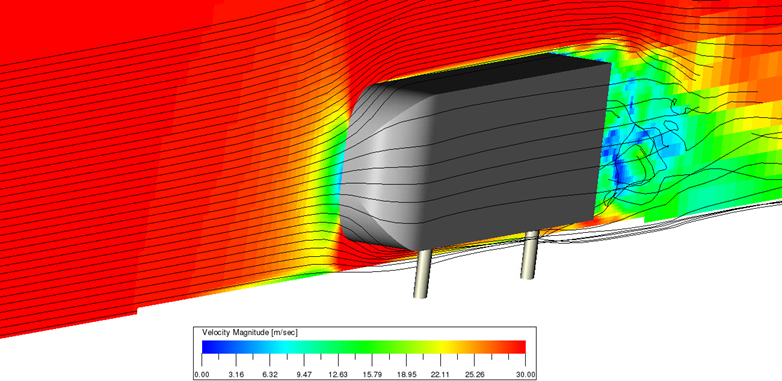
Mesures par PIV dans le sillage de la maquette

Eléments arrondis pour association avec les jets pulsés
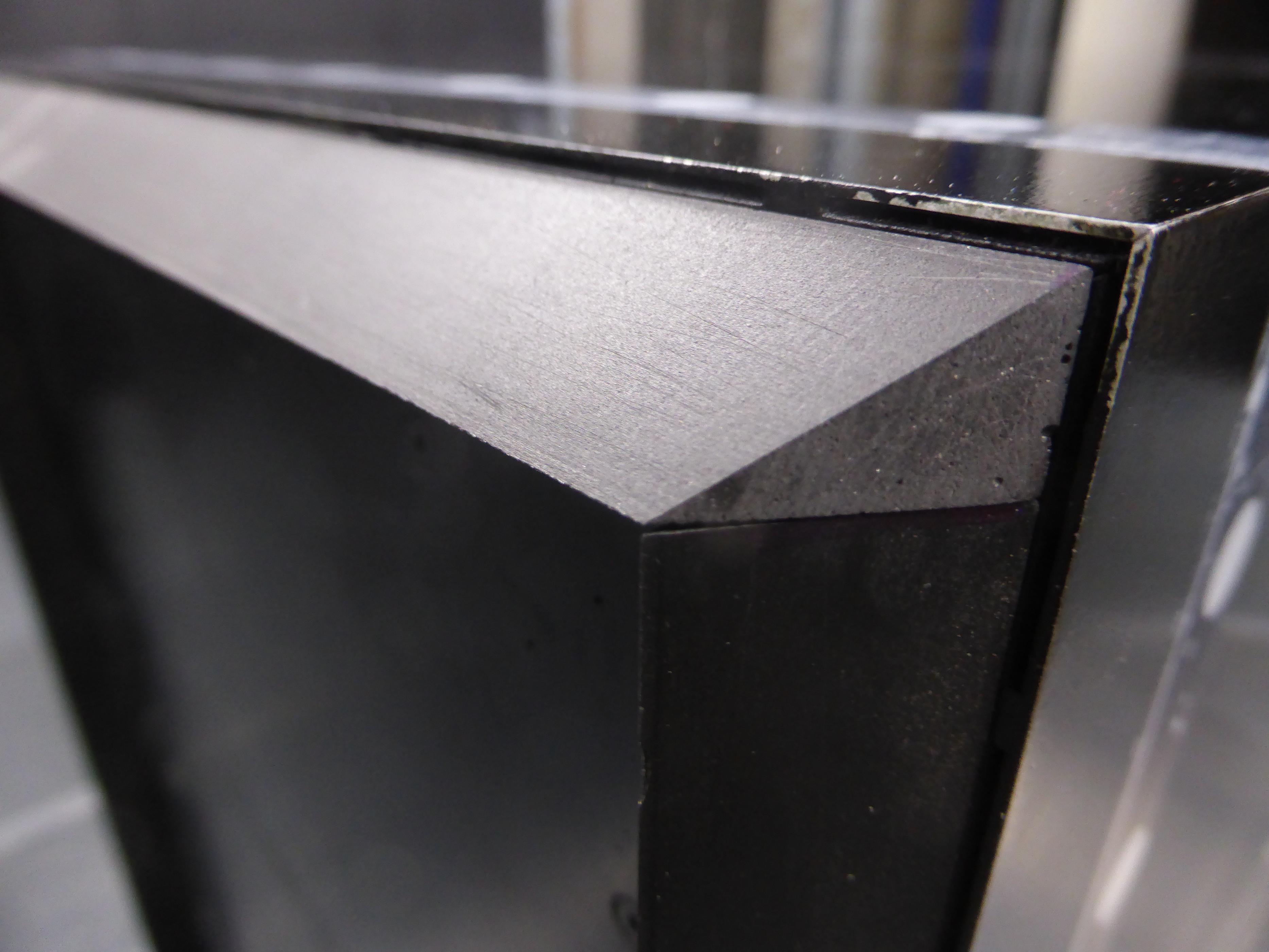
Volets plans pour association avec les jets pulsés
En complément des liens vers les partenaires impliqués dans le projet, disponibles dans la rubrique Partenaires, on répertorie ici différentes pages en lien avec les activités développées dans le programme Activ_ROAD.